kategorier: Udvalgte artikler » Praktisk elektronik
Antal visninger: 162,237
Kommentarer til artiklen: 4
Sådan opretter du et gør-det-selv-relæ
 Hvad er et tidsrelæ? Handlingsalgoritme tidsrelæ enkel nok, men nogle gange kan det medføre beundring. Hvis vi husker de gamle vaskemaskiner, der kærligt blev kaldt "skovlen med en motor", var timers handling meget klar: De vendte drejeknappen et par kryds, noget begyndte at tikke indeni, og motoren startede.
Hvad er et tidsrelæ? Handlingsalgoritme tidsrelæ enkel nok, men nogle gange kan det medføre beundring. Hvis vi husker de gamle vaskemaskiner, der kærligt blev kaldt "skovlen med en motor", var timers handling meget klar: De vendte drejeknappen et par kryds, noget begyndte at tikke indeni, og motoren startede.
Så snart håndtagsviseren nåede opdelingen i nul skala, sluttede vasken. Senere dukkede biler med to timere op - vask og spinding. I sådanne maskiner blev tidsrelæerne lavet i form af en metalcylinder, hvor urmekanismen var skjult, og udenfor var der kun elektriske kontakter og en kontrolknap.
Moderne vaskemaskiner - automatiske maskiner (med elektronisk kontrol) har også et tidsrelæ, og det blev umuligt at fremstille det som et separat element eller en del på kontroltavlen. Alle tidsforsinkelser opnås programmeret ved hjælp af kontrolmikrokontrolleren. Hvis man ser nøje på cyklussen for den automatiske vaskemaskine, kan antallet af tidsforsinkelser simpelthen ikke tælles. Hvis alle disse tidsforsinkelser blev udført i form af en urmekanisme for det førnævnte, ville der simpelthen ikke være nok plads i vaskemaskinens krop.
Tidsrelæ de bruges ikke kun i vaskemaskiner, for eksempel i mikrobølgeovne, ved hjælp af tidsforsinkelser reguleres ikke kun driftstiden, men også varmekraften. Dette gøres som følger: RF-spændingen tændes i 5 sekunder og slukkes i 5. Den gennemsnitlige varmekraft i dette tilfælde er 50%. For at få 30% strøm er det nok at tænde for RF i 3 sekunder. Følgelig er højfrekvenslampen i slukket tilstand placeret i 7 sekunder. Naturligvis kan disse numre være forskellige, for eksempel 50 og 50 eller 30 og 70, lige her vises forholdet mellem on-off tid for HF.
Nævnelse af gamle vaskemaskiner gives af en grund. Det er her, i dette eksempel, kan du se, selv føle med dine hænder, hvordan tidsrelæet fungerer.
At dreje sveiven med uret er intet andet end en lukkerhastighed. Aktuatoren (elektrisk motor) tændes straks. Lukkerhastigheden, i dette tilfælde i minutter, bestemmer håndtagets rotationsvinkel. Således udføres to handlinger på én gang: indlæsning af eksponeringstiden og faktisk start af selve tidsforsinkelsen. Når den indstillede tid er gået, slukkes aktuatoren. Alle tidsrelæer eller timere fungerer selv ca., også dem, der er skjult inde mikrokontrollere (MK).
Fra urværk til elektronik
Sådan får du en tidsforsinkelse ved hjælp af MK
Hastigheden på moderne MK er meget høj, op til adskillige snesevis af mips (millioner af operationer pr. Sekund). Det ser ud til, at for ikke så længe siden var der kamp for 1 mips på personlige computere. Nu opfylder selv forældede MK'er, for eksempel 8051-familien, let denne 1 mips. Således vil det tage nøjagtigt et sekund at gennemføre 1.000.000 operationer.
Her, en tilsyneladende færdiglavet løsning, hvordan man får en tidsforsinkelse. Bare udfør den samme operation en million gange. Dette kan gøres ganske enkelt, hvis denne operation er sløjfe i programmet. Men problemet er, at ud over denne operation kan MK i et øjeblik ikke gøre noget andet. Her har du opnået teknik, her har du mips! Og hvis du har brug for en lukkerhastighed på flere titalls sekunder eller minutter?
Timer - en enhed til tælling af tid
For at forhindre en sådan forlegenhed opvarmede processoren ikke bare sig selv, udførte en unødvendig kommando, der ikke ville gøre noget nyttigt, timere blev indbygget i MK, som regel flere af dem.Hvis du ikke går nærmere på detaljer, er timeren en binær tæller, der tæller de impulser, der genereres af et specielt kredsløb inde i MK.
F.eks. Genereres i MK-familien 8051 en tællepuls, når hver kommando udføres, dvs. timeren tæller blot antallet af udførte maskininstruktioner. I mellemtiden er den centrale behandlingsenhed (CPU) roligt involveret i udførelsen af hovedprogrammet.
Antag, at timeren begynder at tælle (der er en modstartkommando for dette) fra nul. Hver puls øger tællerens indhold med en og når til sidst den maksimale værdi. Derefter nulstilles tællerens indhold. Dette øjeblik kaldes "counter overløb". Dette er netop slutningen af tidsforsinkelsen (husk vaskemaskinen).
Antag, at timeren er 8-bit, så kan den bruges til at beregne en værdi i området 0 ... 255, eller tælleren vil strømme over hver 256 impulser. For at gøre lukkerhastigheden kortere er det nok at starte optællingen ikke fra bunden, men fra en anden værdi. For at få det, er det nok at først indlæse denne værdi i tælleren og derefter starte tælleren (husk igen vaskemaskinen). Dette forudindlæste nummer er rotationsvinklen for tidsrelæet.
En sådan timer med en frekvens af operationer på 1 mips giver dig mulighed for at få en lukkerhastighed på højst 255 mikrosekunder, men du har brug for et par sekunder eller endda minutter, hvad skal du gøre?
Det viser sig, at alt er ganske enkelt. Hver timeroverløb er en begivenhed, der får hovedprogrammet til at blive afbrudt. Som et resultat skifter CPU'en til det tilsvarende underprogram, hvilket af sådanne små uddrag kan tilføje ethvert, mindst op til flere timer og endda dage.
Rutinen for afbrydelse af service er normalt kort, ikke mere end et par dusin kommandoer, hvorefter der igen er tilbage til hovedprogrammet, der fortsætter med at køre fra det samme sted. Prøv dette uddrag ved en simpel gentagelse af de kommandoer, som det blev sagt ovenfor! Selvom du i nogle tilfælde skal gøre netop det.
For at gøre dette er der en NOP-kommando i processor-kommandosystemerne, som bare ikke gør noget, det tager kun maskintid. Det kan bruges til at reservere hukommelse, og når der oprettes tidsforsinkelser, er det kun meget korte i størrelsesordenen et par mikrosekunder.
Ja, læseren vil sige, hvordan han led! Fra vaskemaskiner direkte til mikrokontrollere. Og hvad var der mellem disse ekstreme punkter?
Hvad er tidsrelæer?
Som allerede nævnt Tidsrelæets hovedopgave er at opnå en forsinkelse mellem indgangssignalet og udgangssignalet. Denne forsinkelse kan genereres på flere måder. Tidsrelæerne var mekaniske (allerede beskrevet i begyndelsen af artiklen), elektromekanisk (også baseret på et urværk, kun fjederen er viklet af en elektromagnet) samt med forskellige dæmpeanordninger. Et eksempel på et sådant relæ er den pneumatiske tidsafbryder vist i figur 1.

billede 1. Pneumatisk tidsrelæ.
Relæet består af et elektromagnetisk drev og et pneumatisk tilbehør. Relæspolen er tilgængelig ved driftsspændinger på 12 ... 660V AC (16 samlede klassificeringer) med en frekvens på 50 ... 60Hz. Afhængig af versionen af relæet kan lukkerhastigheden starte enten når den udløses, eller når det elektromagnetiske drev udløses.
Tiden indstilles af en skrue, der regulerer tværsnittet af hullet, så luft kan forlade kammeret. De beskrevne tidsrelæer adskiller sig i ikke meget stabile parametre, derfor bruges der, hvor det er muligt, altid elektroniske tidsrelæer. På nuværende tidspunkt kan sådanne relæer, både mekaniske og pneumatiske, måske kun findes i gammelt udstyr, som endnu ikke er blevet erstattet af moderne udstyr og endda på et museum.
Elektroniske tidsrelæer
En af de mest almindelige var måske VL-60 ... 64-relæserien og nogle andre, for eksempel VL-100 ... 140 relæer.Alle disse timere blev bygget på en specialiseret chip KR512PS10. Udseendet af luftledningsrelæet er vist i figur 2.

Figur 2. Tidsrelæserie VL.
Kredsløbet for VL - 64 tidsrelæet er vist i figur 3.

Figur 3 Skema med timeren VL - 64
Når der tilføres en spænding til indgangen gennem ensretterbroen VD1 ... VD4, tilføres spændingen gennem stabilisatoren på KT315A-transistoren til DD1-chippen, hvis interne generator begynder at generere impulser. Pulsenes frekvens reguleres af en variabel modstand PPB-3B (det er den der vises på relæets frontpanel), der er seriekoblet med en 5100 pF timingskondensator, som har en tolerance på 1% og en meget lille TKE.
De modtagne pulser tælles med en tæller med en variabel delingskoefficient, der indstilles ved at skifte terminalerne på mikrokredsløbet M01 ... M05. I VL-serierelæet blev denne switching udført fra fabrikken. Det maksimale delingsforhold for hele tælleren når 235.929.600. I henhold til dokumentationen til mikrokredsløbet, med en frekvens af masteroscillatoren 1 Hz, kan lukkerhastigheden nå mere end 9 måneder! Ifølge udviklerne er dette helt nok til enhver applikation.
Pin 10 på END-chippen er slutningen af lukkerhastigheden, der er forbundet til indgang 3 - ST start - stop. Så snart der vises en højspændingsspænding ved END-udgangen, stopper pulsoptællingen, og der vises en højspændingsspænding på 9. udgang fra Q1, som åbner KT605-transistoren, og relæet, der er tilsluttet KT605-kollektoren, udløses.
Moderne tidsrelæer
Som regel laves på MK. Det er lettere at programmere en færdiglavet proprietær mikrokredsløb, tilføje et par knapper, en digital indikator, end at opfinde noget nyt, og derefter også deltage i finjustering af tiden. Et sådant relæ er vist i figur 4.

Figur 4 Mikrocontroller tidsrelæ
Hvorfor laver en gør-det-selv-relæ?
Og selv om der er et så stort antal tidsafbrydere, skal du næsten for enhver smag somme tider hjemme gøre noget selv, ofte meget enkelt. Men sådan design retfærdiggør ofte sig selv fuldstændigt og fuldstændigt. Her er nogle af dem.
Så snart vi netop har undersøgt driften af KR512PS10-mikrokredsløb som en del af luftledningsrelæet, bliver vi nødt til at overveje amatørkredsløb derfra. Figur 5 viser timerkredsløbet.

Figur 5. Timer på KR524PS10-mikrokredsløb.
Mikrokredsløbet drives fra den parametriske stabilisator R4, VD1 med en stabiliseringsspænding på ca. 5 V. På opstartstidspunktet genererer R1C1-kredsløbet en mikrocircuit-nulstillingspuls. Dette starter den interne generator, hvis frekvens indstilles af R2C2-kæden, og den indre tæller for mikrokredsløbet starter tælling af pulser.
Antallet af disse pulser (moddelingsforhold) indstilles ved at skifte terminalerne på mikrokredsløbet M01 ... M05. Med den position, der er angivet i diagrammet, vil denne koefficient være 78643200. Dette antal impulser udgør signalets fulde periode ved END-udgangen (pin 10). Pin 10 er tilsluttet pin 3 ST (start / stop).
Så snart END-output er indstillet til et højt niveau (en halv periode er talt), stopper tælleren. På samme tid indstiller output Q1 (pin 9) også et højt niveau, der åbner transistoren VT1. Gennem en åben transistor tændes relæ K1, der styrer belastningen med dens kontakter.
For at starte tidsforsinkelsen er det nok at slå relæet kort fra og igen. Timingsdiagrammet for END- og Q1-signalerne er vist i figur 6.

Figur 6. Tidsdiagram over END- og Q1-signaler.
Med værdierne for R2C2-timingkæden angivet på diagrammet er generatorfrekvensen ca. 1000 Hz. Derfor er tidsforsinkelsen for den angivne forbindelse af terminalerne M01 ... M05 ca. ti timer.
For at finjustere denne lukkerhastighed, skal følgende gøres. Tilslut terminalerne M01 ... M05 til positionen "Seconds_10", som vist i tabellen på figuren 7.
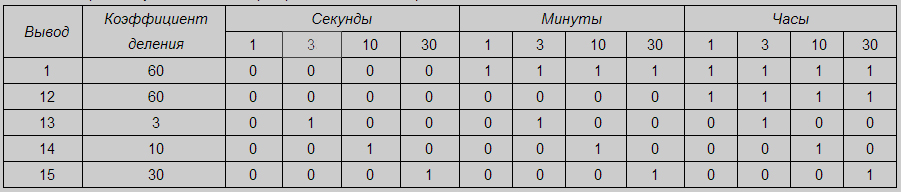
Figur 7. Timerindstillingstabel (klik på billedet for at forstørre).
Med denne forbindelse skal du dreje den variable modstand R2 for at justere lukkerhastigheden i 10 sekunder. ved stopur. Tilslut derefter terminalerne M01 ... M05, som vist i diagrammet.
Et andet diagram på KR512PS10 er vist i figur 8.

Figur 8 Relæ til chiptid KR512PS10
Endnu en timer på KR512PS10-chippen.
Til at begynde med er vi opmærksomme på KR512PS10, mere præcist, til END-signalerne, der overhovedet ikke vises, og ST-signalet, som simpelthen er forbundet til en fælles ledning, der svarer til et logisk nulniveau.
Når denne tændes, stopper tælleren ikke, som vist i figur 6. END- og Q1-signalerne fortsætter cyklisk uden stop. Formen på disse signaler vil være en klassisk krumning. Således viste det sig blot en generator med rektangulære impulser, hvis frekvens kan styres af en variabel modstand R2, og tællerinddelingsfaktoren kan indstilles i henhold til tabellen vist i figur 7.
Kontinuerlige impulser fra output Q1 går til tælleindgangen til decimaltælledekoderen DD2 K561IE8. Når R4C5-kæden tændes, nulstilles tælleren til nul. Som et resultat vises et højt niveau ved udgangen fra dekoderen “0” (pin 3). Ved output 1 ... 9 lave niveauer. Med ankomsten af den første tællepuls bevæger et højt niveau sig til output "1", den anden puls indstiller et højt niveau ved output "2" og så videre, op til output "9". Derefter overløber tælleren, og tællecyklussen begynder på ny.
Det resulterende styresignal gennem afbryderen SA1 kan føres til lydgeneratoren på elementerne DD3.1 ... 4 eller til relæforstærkeren VT2. Mængden af tidsforsinkelse afhænger af positionen af switch SA1. Med terminalforbindelserne M01 ... M05 angivet på diagrammet og parametrene for R2C2-timingkæden er det muligt at få tidsforsinkelser, der spænder fra 30 sekunder til 9 timer.
Boris Aladyshkin
Se også på elektrohomepro.com
: