kategorier: Begynderelektrikere, Elektriske motorer og deres anvendelse
Antal visninger: 8782
Kommentarer til artiklen: 0
Motorisk klassificering
Afhængig af formålet, af de forventede driftsformer og betingelser, af typen strømforsyning osv., Kan alle elektriske motorer klassificeres efter flere parametre: i henhold til princippet om at opnå driftsmomentet, efter driftsmetoden, efter fødestrømmen, efter metoden med fasestyring, ved type excitation osv. Lad os overveje klassificeringen af elektriske motorer mere detaljeret.

Forekomst af drejningsmoment
Moment i elektriske motorer kan opnås på en af to måder: ved hjælp af magnetisk hysterese eller rent magnetoelektrisk. Hysteresemotor modtager et drejningsmoment gennem hysteresen under magnetisering reversering af en magnetisk solid rotor, mens magnetoelektrisk motor drejningsmoment er resultatet af samspillet mellem de eksplicit magnetiske poler i rotoren og statoren.

I dag udgør magnetoelektriske motorer med rette brorparten af den samlede overflod af elektriske motorer, der bruges i så mange felter. De er opdelt efter leveringsstrømmenes art i:
-
DC-motorer
-
AC-motorer
-
universelle motorer.
I modsætning til en magnetoelektrisk motor er magnetiseringen af rotoren i forhold til dets geometriske akser tilladt i hysteresemotoren, og dette særlige træk tillader ikke, at de generelle love for magnetoelektrisk konvertering udvides til den synkrone driftsmåde for hysteresemotoren.
Se - Enhed og handlingsprincip for den enkleste elektriske motor og Sådan fremstilles en simpel elektrisk motor på 10 minutter

Motorisk klassificering
DC-motorer

I en motor, der er drevet af jævnstrøm, er motoren selv ansvarlig for at skifte faser. Dette betyder, at selv om der er tilført en jævn strøm til den elektriske maskine, dog på grund af virkningen af indretningens indre mekanismer, viser det sig, at magnetfeltet er i stand til at opretholde rotormomentet (som om en vekselstrøm virker i statorviklingen).

Enheden og betjeningen af DC-motoren: 1 - anker, 2 - aksel, 3 - kollektorplader, 4 - børsteindretning, 5 - armaturmagnetisk kredsløb, 6 - induktormagnetisk kredsløb, 7 - feltviklinger, 8 - induktorkroppe, 9 - sideskærme 10 - ventilator, 11 - fødder, 12 - lejer.
En jævnstrømsmotor består af en fast del kaldet en induktor og en bevægelig del kaldet et anker. Afhængigt af designet kan permanente magneter placeres på induktoren på induktoren, hvilket forenkler designet, men ikke giver dig mulighed for at justere motorens magnetiske flux, hvilket påvirker dens hastighed.
Ved metoden til at skabe et bevægende magnetfelt er DC-motorer opdelt i:
-
ventil (børsteløs)
-
samler.
Børsteløse motorer har elektroniske invertere i deres design, der udfører faseomskiftning. Samlermotorer er traditionelt udstyret børsteopsamlerenheder, der er designet til rent mekanisk at synkronisere motorviklingernes kraft med rotationen af dens bevægelige dele.
Excitation af kollektormotorer

I henhold til exciteringsmetoden er kollektormotorer af følgende typer: med uafhængig excitation fra permanente magneter eller fra elektromagneter eller med selv-excitation. Permanente magnetcitationsmotorer indeholder magneter på rotoren.Selvudviklede motorer har et specielt anker, der vikles på rotoren, som kan tilsluttes parallelt, sekventielt eller blandes med en særlig exciteringsvikling.
Rippelmotor
En pulserende strømmotor svarer til en jævnstrømsmotor. Forskellen ligger i tilstedeværelsen af foret indsatser på kernen samt yderligere foret poler. Derudover har ringstrømmotoren en kompensationsvikling. Sådanne motorer bruges i elektriske lokomotiver, hvor de normalt drives udbedret vekselstrøm.
AC-motor
AC-motorer drives, som navnet antyder, af vekselstrøm. De er synkrone og asynkrone.
For synkron AC-motorer bevæger statormagnetfeltet sig med samme vinkelhastighed som rotoren, mens asynkronmotorer altid har en vis forsinkelse (kendetegnet ved slipværdien s) - det statormagnetiske felt i sin bevægelse ser ud til at være foran rotoren, som igen altid er søger at indhente ham.
Højeffekt synkronmotorer (hundreder af kilowatt) har feltviklinger på rotoren. Rotorerne i mindre kraftige synkronmotorer er udstyret med permanente magneter, der danner polerne. Hysteresemotorer er også i princippet synkrone.
Trinmotorer - Dette er en speciel kategori af synkronmotorer med stor nøjagtighed af hastighedskontrol op til et diskret trinantal.
Ventil synkrone jetmotorer drives via en inverter.Se dette emne:Moderne synkrone jetmotorer

Asynkrone vekselstrømsmotorer er kendetegnet ved det faktum, at deres vinkelhastighed for rotoren altid er mindre end vinkelhastigheden for statorens magnetfelt. Induktionsmotorer er enkeltfase (med startvikling), to-fase (en kondensatormotor gælder også for dem), trefase og flerfase.
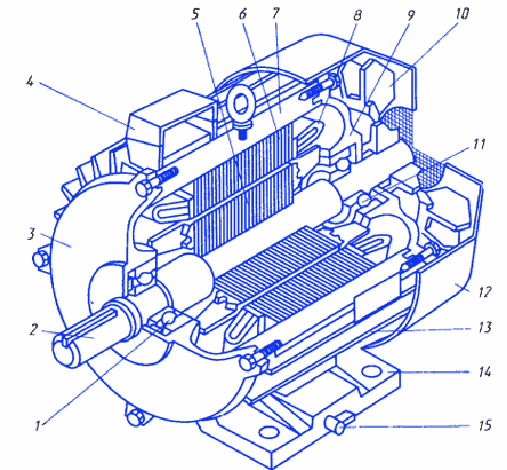
Trefaset egernebur-induktionsmotordesign
En asynkron elektrisk motor består af både en fast (stator) del og en bevægelig (rotor) del, der holdes af lejer 1 og 11 installeret i sidedækslerne 3 og 9. Rotoren består af en aksel 2, hvorpå et magnetisk kredsløb 5 med en vikling er fastgjort. Motorstatoren består af et hus 7, hvortil et magnetisk kredsløb er fastgjort 6. En trefaset vikling er lagt i rillerne i det magnetiske kredsløb 8. Klemkassedækslet 4 og pumpehjulets beskyttelsesdæksel 12 er også fastgjort til huset.
Faserotoren har en trefasetvikling, der er fremstillet af typen statorvikling. Nogle ender af spolerne er forbundet til nulpunktet ("stjerne"), mens andre er forbundet til glideringene. Børster pålægges ringene, hvilket skaber glidekontakt med rotorviklingen. Med dette design er det muligt at forbinde en start- eller justeringsreostat med rotorviklingen, hvilket gør det muligt at ændre den elektriske modstand i rotorkredsløbet.
Se også - Forskelle mellem induktionsmotorer og jævnstrømsmotorer, Forskelle mellem egernebur og faselåst induktionsmotor
En asynkron motor med en frekvensomformer til jævn kontrol af akselens omdrejningshastighed ved at ændre frekvens og forsyningsspænding:

Universal børste motorer
Den universelle kollektormotor kan fungere mindst fra direkte, selv fra vekselstrøm (50 Hz). Har seriel excitation, bruges i elektriske husholdningsapparaterhvor der kræves en rotationshastighed, der er højere end maksimumet for konventionelle AC-motorer på 3000 o / min. Som regel overstiger effekten af sådanne motorer ikke 200 watt. fundet tyristorkontrol universal motorhastighed.
En forbedret version af universalmotoren er en synkronmotor med en rotorpositionssensor, hvor kollektorens rolle spilles af en elektronisk inverter.
Andre nyttige artikler om dette emne:
Typer af elektriske motorer og principperne for deres arbejde
Egenskaber ved induktionsmotorer
Sådan bestemmes en elektromotors rotationshastighed
Sådan kontrolleres den elektriske motor
Sådan adskilles en induktionsmotor
Typer og arrangement af omdrejninger af samlermotorens hastighed
Se også på elektrohomepro.com
: