kategorier: Begynderelektrikere, Programmerbare controllere
Antal visninger: 8010
Kommentarer til artiklen: 4
Et eksempel på opgradering af det elektriske kredsløb i en godslift ved hjælp af en programmerbar controller (PLC)
For nylig er emnet med automatisering af forskellige teknologiske processer ved hjælp af programmerbare controllere (PLC'er) blevet mere og mere populært. På trods af dette er der meget få praktiske artikler på Internettet med reelle eksempler på, hvordan man programmerer disse PLC'er. Dette emne er meget interessant, fordi det er i krydset mellem elektrisk udstyr, elektronik og programmering. At lære at skrive PLC-programmer er muligt uden engang at have dem. Emuleringstilstand, som er tilgængelig i alle moderne softwarepakker, hjælper meget med dette.
I denne artikel vil jeg vise et eksempel på oversættelse af et elektrisk kredsløb bygget på relæenheder (startere, relæer) til et program, der fungerer på controlleren. Jeg må med det samme sige, at dette kun er et lille uddannelsesprojekt og ikke foregiver at forklare noget mere end blot at forklare de grundlæggende principper for PLC-programmering med et konkret eksempel.
Fragtrelæ Relæ
Den oprindelige plan for dette projekt er et relativt simpelt skema med en godslift (godslift) med håndtagskontrol over to etager. Diagrammet er vist på figuren herunder.

Kommunal elektrisk hejseløft med en motor ved to stop
Der er kun en motor i kredsløbet, der løfter og sænker liften mellem to etager. Dette er en reversibel trefaset asynkronmotor med en 380 V. fase-rotor. Startmodstande og kontakter fra tre elektromagnetiske starter er forbundet til motorrotoren, så motoren kan startes i 3 trin. Denne løsning tillader i processen med at starte motoren at reducere dens startstrøm og øge startmomentet.
Motorstart automatiseres ved hjælp af tre accelerationsrelæer (1RU - 3RU). Dette er konventionelle 24 volt DC timere. For deres magt er der en step-down transformer og ensretter.
En elektromagnetisk brems i trefase blokeres til motorterminalerne, som, når spænding tilføres motoren, bremser dens aksel, og når spændingen forsvinder, spændes motorakslen øjeblikkeligt og fastes i en fast position.
Motor bagud ved hjælp af kontakter fra to elektromagnetiske startere (i diagram B og H). Strøm til kredsløbet forsynes via en afbryder (på kredsløbet - WU) og en afbryder (1A).
Inkludering i elevatorens arbejde er kun muligt i nærvær af spænding. Det styres af et spændingsrelæ (PH), som er placeret på venstre side af kredsløbet. Der er også stikkontakter og en klokke, der kan tændes fra ethvert sted for at ringe til lederen.
Dørene til skaftet og førerhuset åbnes og lukkes manuelt. Elevatoren styres ved hjælp af håndtagskontakten til tre positioner - "Op", "Ned" og "Nul".
Når håndtaget flyttes til en af de ekstreme positioner, begynder elevatoren at bevæge sig, og når det ønskede gulv er nået, flyttes håndtaget mekanisk til "Nul" -stilling. Samtidig brydes kontakterne i switch-kredsløbet, startspolen er slukket, motoren er frakoblet netværket, kontakterne i kredsløbets rotor åbne, og elevatoren stopper. Derefter kan du starte bevægelsen af elevatoren i den modsatte retning.

Godshejsen hører til enheder med øget fare, og i dens skema (som i ordningerne med alle elevatorer) er der et stort antal forskellige sammenkoblinger grænsekontakt kontakter og kontakter på forskellige beskyttelsesanordninger.
I dette skema er dette trip (slut) -afbrydere, der styrer lukningen af kabindøre, aksler på under- og øverste etage, hævning og sænkning af kabinen over de arbejdende øvre og nedre zoner, kontakterne i "slakken af hejsestovene", der åbnes, når kablet er svækket eller løsnet liftkabine, kontakter med hastighedsbegrænser, catcher og kabelspænder. I alt - 14 diskrete sensorer.
Når en af de anførte kontakter åbnes, skal elevatormotoren øjeblikkeligt slukke og bremse, derfor er alle sensorer, spændingsrelækontakten og knappen "Generelt stop" i serie tilsluttet spolekredsløbet for de elektromagnetiske aktuatorer, der styrer motoren.
Oprettelse af et PLC-program til en godslift
Opgaven var, at uden at ændre noget i enheden i princippet betjening og styring af elevatoren, overførte dets kredsløb fra en forældet relævisning til en mulighed ved hjælp af en programmerbar controller.
Fordelen ved programformen til styring af installationen er, at programmet, hvis det ønskes, let kan ændres i fremtiden, forbedre bekvemmeligheden ved at styre elevatoren, ændre logikken for dens funktion og forbedre dens funktionalitet. Men disse handlinger skal ledsages af en ændring i design af elevatoren og tilføjelse af andre ekstra enheder til kredsløbet. I vores version blev en sådan opgave ikke stillet.
I dette tilfælde er der foreslået en mulighed for at modernisere det elektriske udstyr i en godsheves ved at ændre dens kontrolplan med en sådan tilgang, at for eksempel absolut intet ville ændre sig for en person, der betjener en sådan mekanisme.
Derfor gemmer vi hovedkontrolenheden til liften - håndtagskontakten og forlader den asynkronmotor med fasrotoren med sin tretrins opstart, selvom vi stadig ønsker at erstatte den med en asynkronmotor med en egern-burrotor, der tændes via den bløde start. Men for nu vil vi ikke gøre dette, da denne løsning i høj grad vil forenkle det elektriske kredsløb i elevatoren, hvilket ikke er meget kompliceret.
Så vi vil opdele vores skema i fire zoner (se elevatorskemaet i figuren).
")
I zone 1 vil vi ikke røre ved noget, fordi hun er ansvarlig for elevatorens lydopkald og kontrollerer tilstedeværelsen af spænding i kredsløbet. Zone 2 med motor, elektromagnetisk bremse og strømkontakter fra starterne ændrer heller ikke. Alle enheder fra zone 4 kan slettes, fordi rækkefølgen af inkludering af kontakter i motorens rotorkredsløb, når den starter, styres af softwaretimere. Forbliver zone 3. Den vigtigste modernisering påvirker netop denne zone.

Som controller tager vi PLC-selskabet Vædder. Programmet for ham vil være på sproget CFC. Efter min mening er dette det mest behagelige sprog for begyndere. Han ligner meget ind i sproget i funktionelle blokke FBDmen med sine egne små funktioner. Så mange elsker et andet sprog - stigen sprog LD. Jeg har intet imod, men videre CFC Det er mere praktisk for mig at udarbejde et program til PLC, så jeg brugte dette sprog, men her er alt for enhver smag. At kompilere det program, vi bruger pakken CoDeSys 2.3.

Et program er et sæt funktionelle blokke (OG, OR, IKKE, triggere og timere). Arbejdsprogrammet for fragtliften på sproget CFC:

Til at begynde med har vi brug for blokke OG (element Og). Ved udgangen fra elementet er en logisk enhed (i programmet -"TRUE") kun når logiske enheder også er på alle indgange. Hvis tilstanden for endda en input adskiller sig fra enhed, nulstilles output til nul (i programmet - "FALSK").
Dette element hjælper os med at organisere alle sammenkoblede kontakter og sikkerhedskontakter (diskrete input), og som du husker, er der 14 af dem (i programmet er de angivet under navnet SQ1 - SQ14). Ved blokindgangen OG vi forbinder også kontakten til spændingsrelæet og knappen "Generelt stop" (SB1). For nemheds skyld oprettede jeg alle kontakterne på 3 elementer OG, og brugte derefter en anden til at kombinere dem i en kæde.
Som standard, når der tilføjes til programmet, har enhver funktionel enhed 2 input. Hvis du har brug for at tilføje en ekstra input, skal du pege på blokken med musen, trykke på den højre knap på den og vælge "Block input". Således kan du tilføje et hvilket som helst påkrævet antal ekstra input til blokken.

Håndtagskontakten er tilsluttet to indgange på controlleren (i programmet - "SA_verh" og "SA_niz"). En switch i hver af sine to ekstreme positioner forsyner en logisk enhed til en af de to RS triggere ("RS_verh" eller "RS_niz"). En trigger er en analog af en startspole med en blokerende kontakt i et relækontrolkredsløb.
For at aktivere det, skal du indsende den logiske enhed til kontakten "SET"at deaktivere - til"RESET". Trigger output "Q1"sender et signal til en af controller-udgangene -"KM1" eller "KM2"som er forbundet til magnetventilspoler. Startere skifter kontakter og styrer motoren.

Tre-trinsstart i programmet er organiseret ved hjælp af 2 timere "TON". Når du anvender en logisk enhed på timerindgangen "IN"han tæller den tid, der er givet ved input"PT"og skifter udgang af tidsforsinkelse"Q"fra logisk nul til en. Når den første timer (T1) er udløst af et signal fra dens output (Q), begynder tiden at tælle på den anden timer (T2), og efter en tid, der er specificeret ved PT-indgangen, sender den anden timer også en logisk enhed til dens output (Q) .
For at styre output (i programmet - KM3, KM4 og KM5) 3 spoler med elektromagnetisk starter er tilsluttet. Den første af dem tændes straks, når du tænder for KM1 eller KM2 og forbinder den maksimale modstand til motorens rotor, KM4 og KM5 tænd for timer og skiftevis kortslutning af startmodstanden. Efter start af motoren forbliver alle tre startere i position.

element OR (logisk ELLER) nødvendigt for samtidig start af en af de to hovedstartere, blev den del af kredsløbet, der var ansvarlig for den tretrins motorstart, inkluderet i arbejdet. Hvis der er en logisk enhed ved en af indgangene til elementet "OR", transmitteres en logisk enhed til dens output, det vil sige til et signal til en hvilken som helst af dens indgange for dets drift.

Mellem timere og controller-udgange OG med en af de inverse indgange (input cirkel). For dette element vises en logisk enhed ved udgangen kun, når et logisk enhedssignal påføres en normal indgang, og en logisk nul påføres en omvendt.

Det samme element, kun med to inverse indgange, er placeret ved siden af indgange "SA_verh" og "SA_niz", der modtager signaler fra gearskifteren. Dette er nødvendigt for at sikre, at alle startere på udgangene slukkes, når afbryderen returneres til nulstilling, når både op- og ned-kredsløbene er åbne.
Hvis der er to logiske nuller ved indgangen til et sådant element OG giver en logisk enhed ved udgangen af elementet. Dette signal kommer gennem programmet til input af triggere "RESET", nulstilles triggerne til nul, og starterne på udgange er deaktiverede. Elementer OG med en omvendt input mellem timere og output KM3 og KM4 Sluk for disse udgange, og sluk derfor de startere, der er ansvarlige for at skifte modstand i rotorkredsløbet, når motoren er stoppet.

For at indstille en omvendt input eller output, skal du flytte musen til funktionsblokken, vælge den ønskede input eller output, trykke på højre museknap og vælge "Inverter". Tilsvarende kan enhver omvendt input eller output konverteres til almindelig.
elementer OG Numrene 5 og 10 tillader ikke startere, der er ansvarlige for at køre Up- og Down-motoren, tændt på samme tid (beskyttelse mod kortslutning i startkontaktens strømkontakter, mens de tændes). Skønt i dette skema med en gearknap er dette ikke muligt.Men da blokerende kontakter af denne type var til stede i det originale relækredsløb, blev det besluttet at holde dem i programmet til PLC.
Og endelig gjenstår det at sikre øjeblikkelig nedlukning af den elektriske motor, når man åbner nogen af kontakterne ved indgangen. Tilstedeværelsen af triggere i kredsløbet tillader ikke at gøre dette oprindeligt. For at kredsløbet kunne fungere korrekt i en nødsituation (udløse af sikkerhedskontakter, kontakter af udkoblingsafbryderne, spændingsrelækontakt eller knappen "Generelt stop") blev der tilføjet et kredsløb to kæder af elementer IKKE og OR (4 og 7).
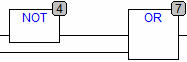
Elementet NOT går forud for den logiske enhed ved indgangen til den logiske nul ved udgangen og vice versa - nul ved indgangen til enheden ved udgangen. Kan du forklare, hvordan kæderne fra NOT og OR fungerer i programmet? Skriv kommentarerne.
Emulering af programmets arbejde på CFC-sprog i CoDeSys
Når du har oprettet programmet, kan du tjekke det ind CoDeSys i emuleringstilstand. For at gøre dette skal du vælge "Emuleringstilstand" under fanen "Online", klikke på "Opret forbindelse" og derefter indstille den logiske enhed til alle indgange - "TRUE", skriv disse værdier til programmet ved at klikke på"Ctrl" + F7 og klik F5 at starte.
Emuleringstilstand iCoDeSys:

Simulering af indgangskontakt ("TRUE"Og"FALSK") du kan se på skiftet af kredsløb i blåt (signalsti) og ændringen i status for udgange. Efter hver ændring i inputtilstand, glem ikke at skrive disse værdier til programmet ved at trykke på"Ctrl" + F7. For at deaktivere emuleringstilstand skal du klikke på "Stop", derefter "Afbryd forbindelse" under fanen "Online" og fjerne markeringen af "Emuleringstilstand".
konklusion
Endnu en gang vil jeg bemærke, at dette projekt udelukkende var relateret til uddannelsesmæssige mål og endnu ikke er testet på en rigtig programmerbar controller. Hvis du har spørgsmål, og noget af ovenstående ikke er klart, så spørg i kommentarerne, jeg vil prøve at besvare dem. Og det er også meget vigtigt for mig at få et svar på spørgsmålet - skal jeg fortsætte med at skrive artikler om dette emne? Generelt er jeg klar til at lytte til alle konstruktive kommentarer og forslag.
Se også på elektrohomepro.com
: